Proportional Throttle on a Power Wheels
Bad user interface caused confusion and fear
When my son first tried riding his new Power Wheels ATV/quad, there was confusion and fear. He already had familiarity with the concept of the throttle grip on a motorcycle, so he reasonably expected that the throttle grip on his Power Wheels is what makes it go. It did not. And to make things worse, it was actually a pedal on one of the foot platforms that actually makes it go. And it’s an on/off switch, full power or nothing. So when he first climbed on, he unintentionally stepped on the pedal, the toy took off at full throttle before he was fully seated, and tears began to flow.

It turns out that the throttle grip on this Power Wheels is only used to enable maximum speed. The foot pedal runs the motors at about half power, and twisting the throttle grip presses a button that runs the motors at full speed (but only if the foot pedal is also pressed). This is stupid. I decided to make it better.
Creating a better user interface
My goal was to modify the Power Wheels to have smooth, fully proportional throttle control using the throttle grip, just like a motorcycle. The more you twist the grip, the faster it goes. Here’s an over-simplified outline of the plan:
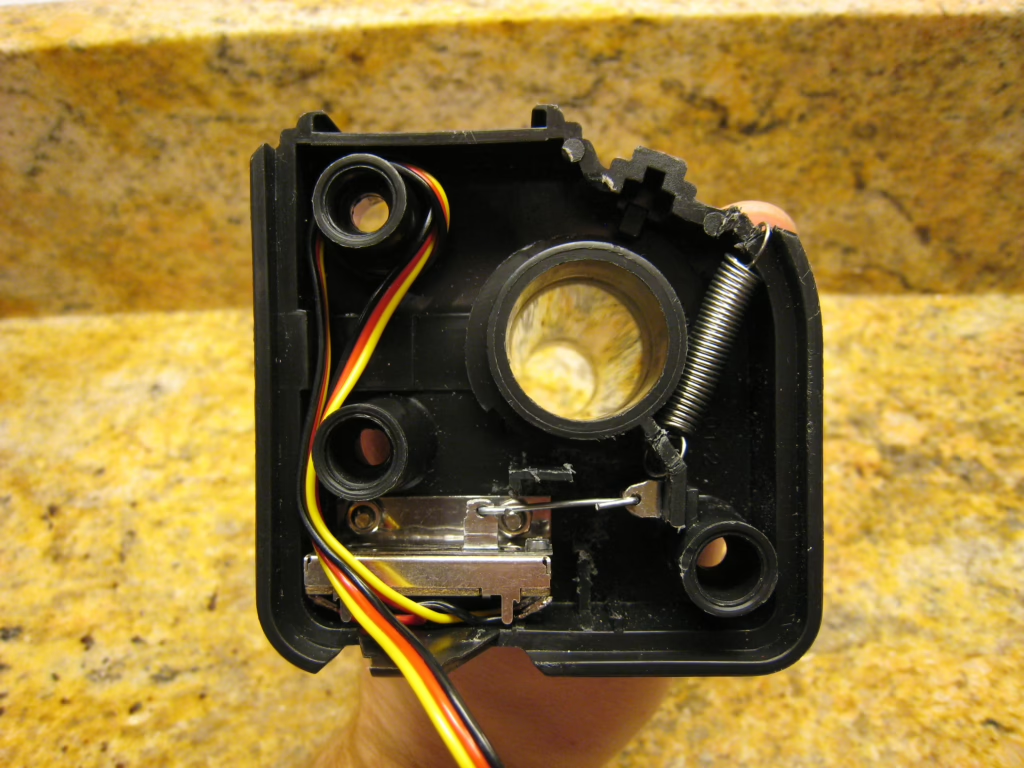
- Modify the throttle grip to move a potentiometer instead of push a button. The potentiometer can be used to measure the position of the throttle grip across a continuous range, instead of only detecting “on” vs “off.
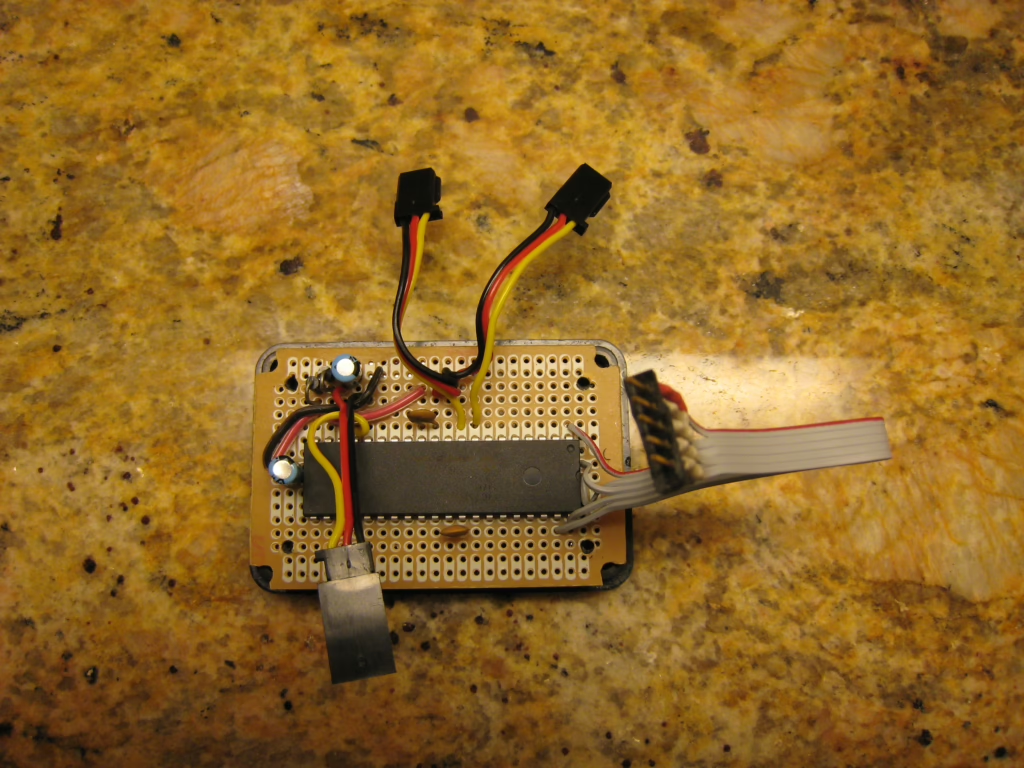
- Program a microcontroller to detect the throttle grip position, and output a throttle position signal that is compatible with an Electronic Speed Controller (ESC) for R/C cars.
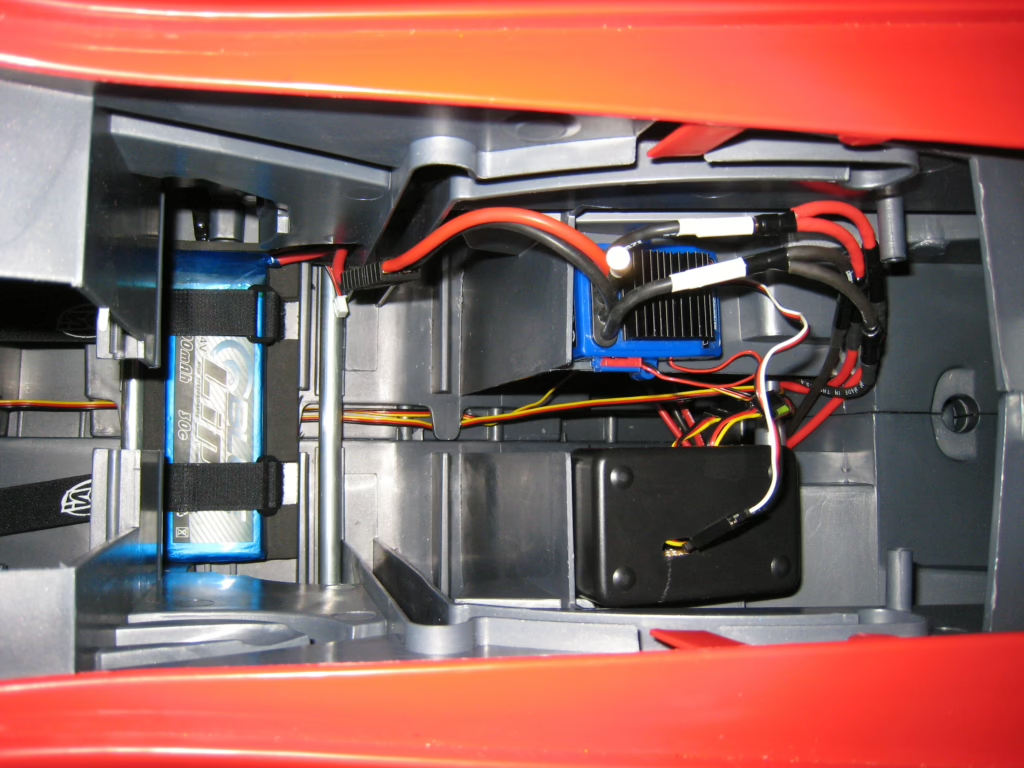
- Rewire the motors so I can connect them to an ESC for R/C cars.
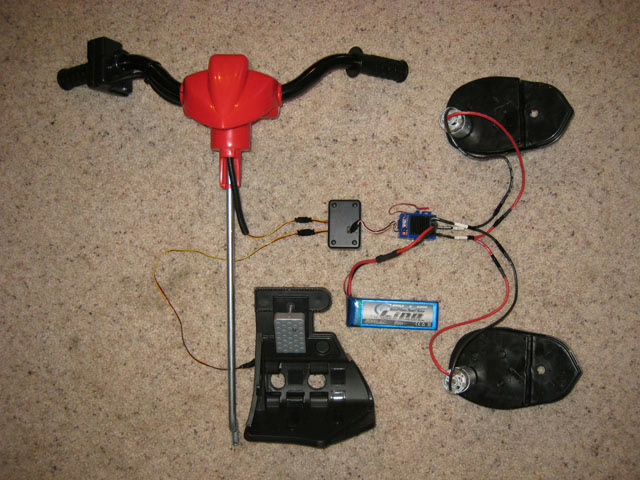
- Connect everything together, and now the Power Wheels has fully-proportional throttle control using the throttle grip!
Of course, it wasn’t quite that simple. There were various complications along the way, like deciding how to implement support for braking and reverse. Since I’m using an R/C car ESC to handle the details of actually powering the motors, I’m stuck with the limitations of how an ESC implements braking and reverse. The same reverse throttle signal is used for both, and the ESC interprets it as either a command to brake or a command to reverse depending on whether how the motors are currently moving (or not).
The first iteration of my modification also involved modifying the foot pedal to be a proportional input, and act as a brake/reverse pedal. This is more “realistic”, like a motorcycle’s brake lever in front of the right foot peg. The problem with this was that my son would still sometimes accidentally step on the pedal when mounting/dismounting. Also, required a child to explicitly press a brake pedal to slow/stop was dangerous. Simply releasing the throttle grip would allow the Power Wheels to continue coasting for quite a while, and children can sometimes panic and forget to actively brake.
The final iteration of my modification eliminated the use of the foot pedal, and made use of the original forward/reverse switch on the Power Wheels to indicate desired direction. The throttle grip position now controls desired speed in that direction. For braking, I made use of a configurable feature of the ESC called “drag brake”. It’s basically like modern electric vehicles with one-foot driving, where the vehicle will brake and come to a stop as you lift off the accelerator pedal. This turned out to be the simplest and safest design for a child, because it will come to a fairly quick stop even if they panic and simply let go of the throttle (no need to remember to press the brake pedal).
Notable Features
Throttle Damping
Since I am using a microcontroller to convert throttle grip position to a throttle signal for the ESC, it doesn’t need to be a direct 1-to-1 conversion. I implemented throttle position damping to limit the rate at which the throttle position can increase. This smooths out throttle response when a child suddenly twists the throttle all the way.
Reverse Lockout
When the reverse switch changes, I don’t suddenly reverse the throttle position signal to the ESC. The change in direction is not applied until the throttle position is fully “off”. This prevents a sudden jerk between forward and reverse. This is an improvement over the original Power Wheels design, which would suddenly switch bettween forward and reverse at full power.
Remote Control Override
This was more just for my own challenge and the fun of messing with my kids, but I justified it as a “safety feature” that would allow me to to remotely hit the brakes to prevent a crash. I added another input to the microcontroller to monitor the throttle position output of an R/C car receiver. Any non-neutral input from the receiver would take precedence, and the child would not regain control of throttle until both the radio-control throttle position AND the throttle grip position returned to neutral.
Read More
I documented my progress (including many photos of disassembly and modification) and some of the complexities/complications I encountered along the way on the Modified Power Wheels Forum.
More Photos